Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Short description of portfolio item number 1
Short description of portfolio item number 2
The hydraulic quadruped robot is inspired by the bionics of mammals. 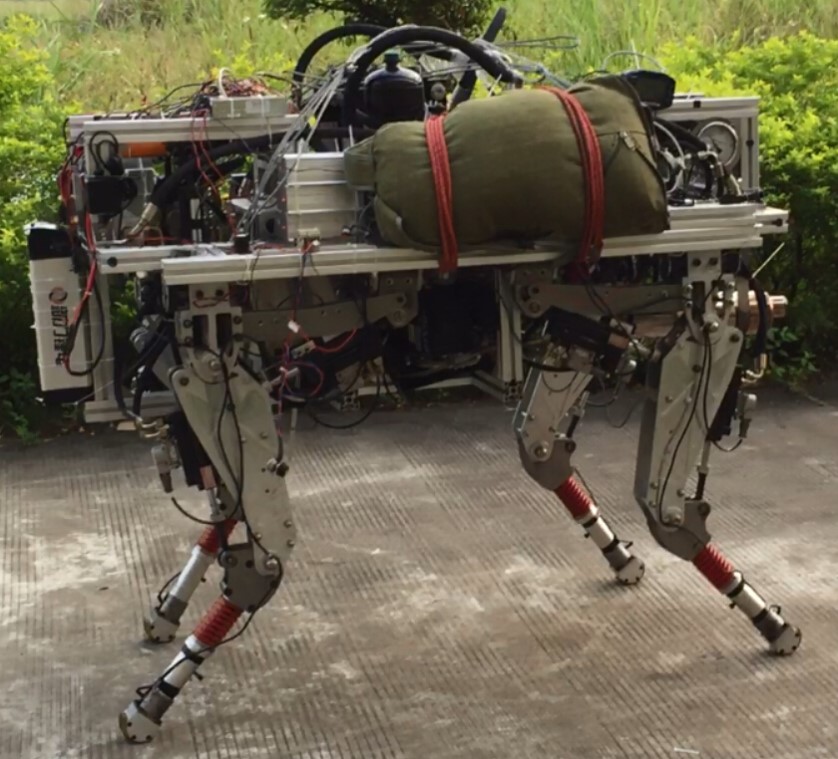
Lidar-based localisation algorithm applied on indoor mobile platform
Design localisation algorithm for the quadruped robot dancing in TV gala. 
The UV disinfection robot integrated with multiple sensors is designed to autonomously explore indoor areas and navigate in the built map. 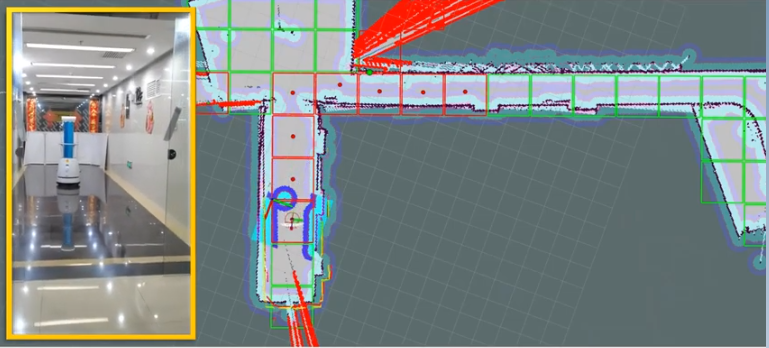
Autonomous car running in Dubbo, NSW. 
Build 3D maps with multiple Lidars and cameras. 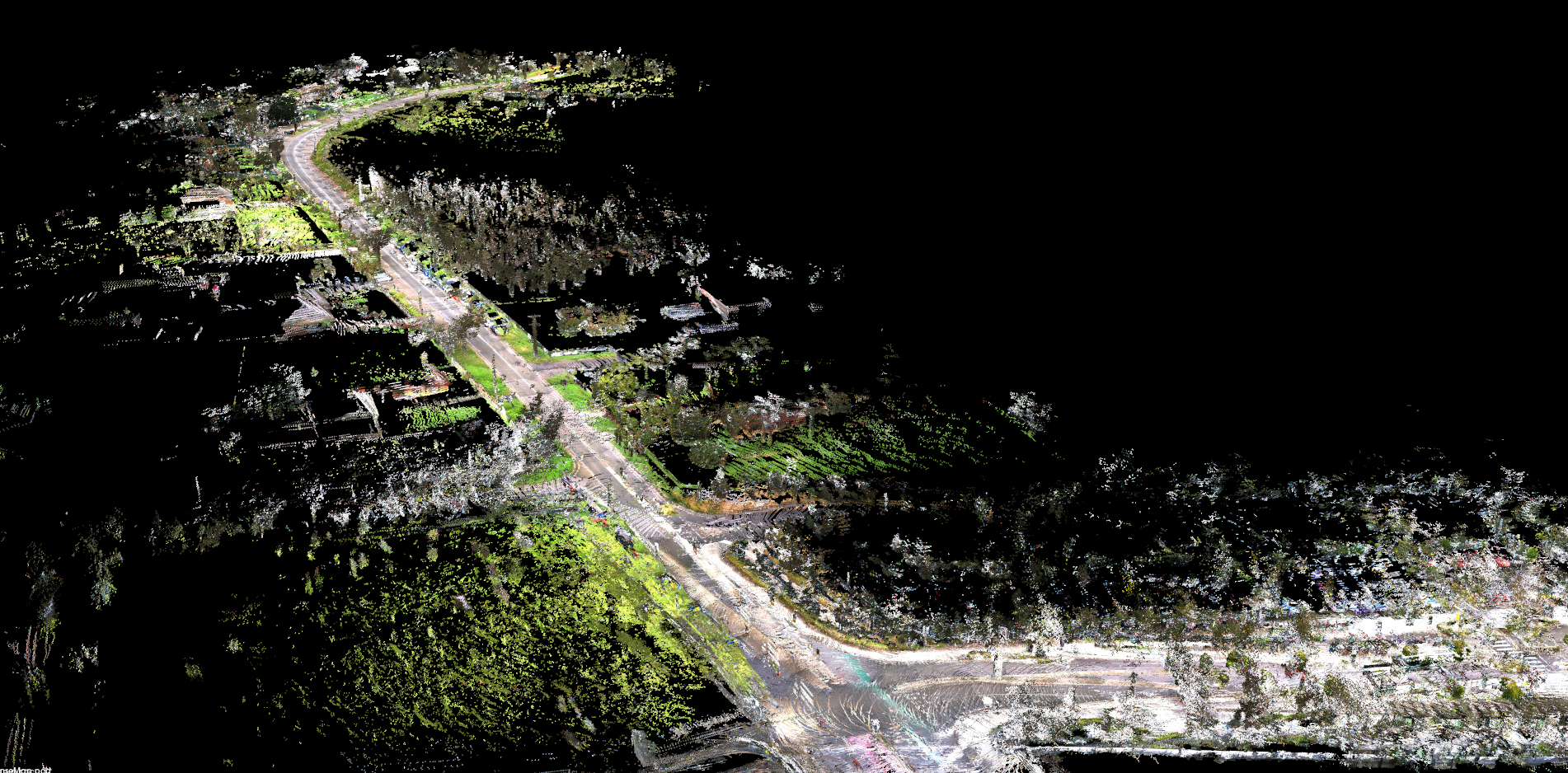
Intelligent mower driven by AI 
Published in Australasian Conference on Robotics and Automation, ACRA, 2018
This paper presents a Gaussian mixture model (GMM) based robust scan matching method which implements GMM to represent 2D scan points and improves the accuracy of scan matching.
Recommended citation: Zhao, J. (2018, January). Constrained Gaussian mixture models based scan matching method. In Australasian Conference on Robotics and Automation, ACRA. Read paper
Published in IEEE Access, 2019
This paper defines a conic feature based parametrization approach and proposes a SLAM algorithm that can get accurate results fo the open environment.
Recommended citation: J. Zhao, "Conic Feature Based Simultaneous Localization and Mapping in Open Environment via 2D Lidar," in IEEE Access, vol. 7, pp. 173703-173718, 2019, doi: 10.1109/ACCESS.2019.2956563. Read paper
Published in IEEE Robotics and Automation Letters, 2020
This paper formulates the SLAM problem with implicit functions as features, with rigorously computed observation covariance matrix to be used in the SLAM objective function and proposes a solution framework.
Recommended citation: J. Zhao, "2D Laser SLAM With General Features Represented by Implicit Functions," in IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4329-4336, July 2020, doi: 10.1109/LRA.2020.2996795. Read paper
Published in IEEE Robotics and Automation Letters, 2021
The main contribution of this paper is a 2D laser SLAM approach with Fourier series based feature parameterization and submap joining.
Recommended citation: J. Zhao, "2D Laser SLAM With Closed Shape Features: Fourier Series Parameterization and Submap Joining," in IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1527-1534, April 2021, doi: 10.1109/LRA.2021.3058065. Read paper
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.